1. LJUDSKI RAD
Čovjek od pamtivijeka teži tome da si olakša svakodnevni život. Tokom povijesti smišljao je različite alate kojima se služio prilikom obavljanja svog posla. U doba lovačke kulture smišljao je različita oružja za lakši i efikasniji lov. Kada je počeo obrađivati zemlju smišljao je različite alate za obradu zemlje. Veoma brzo je uvidio da može koristiti tuđi rad. Kroz povijesna razdoblja koristio je različite izvore tog rada. U ranim danima su taj posao umjesto njega obavljale životinje, u doba ropstva to su bili drugi ljudi s manje sreće, tokovi rijeka, itd. Nakupljanjem znanja čovjek je bio u stanju proizvesti sve složenije i efikasnije alate. Otkriće parnog stroja početkom 18.stoljeća(1712.g. T. Newcomen), predstavljalo je pravu revoluciju u tehnologiji jer je to bio prvi stroj s unutrašnjom energijom i sad bilo moguće da jedan stroj uz mali ljudski rad obavi posao za koji su prije trebale desetine ili čak stotine ljudi. To je potaknulo maštanja da će jednog dana biti moguće napraviti stroj koji će u potpunosti zamijeniti ljudski rad, to će biti strojevi koji će biti samostalni u radu i koji će ljudskom rodu omogućiti lagodan život uz minimalan rad, a onima spretnijeg uma i dobar profit. Međutim od otkrića parnog stroja do razvoja prve samostalne robotske ruke morati će proći više od jednog stoljeća upornog nakupljanja znanja u različitim područjima tehničkih znanosti.
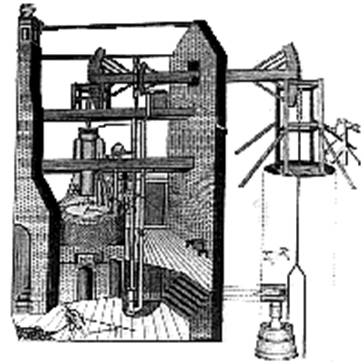
Slika 1. Newcomenov parni stroj
2. PODRIJETLO RIJEČI ROBOT
Podrijetlo
riječi robot nema svoje korijene u tehničkim
znanostima već porijeklo vuče iz književnosti. Češki spisatelj Karel
Čapek (1890.-1938.) pisao je djela koja žanrovski spadaju u znanstvenu
fantastiku. U siječnju 1921. godine praizveden je u Pragu njegov kazališni komad s nazivom
˝R.U.R.˝(Rossumovi Univerzalni Roboti).
U toj drami opisuju se dramatični trenuci prevrata kada čovjekolike tvorevine, izrađene prema tajnoj formuli
doktora Rossuma preuzimaju vlast na
Zemlji i počinju svoju vladavinu nad
ljudima. Dan praizvedbe R.U.R.-a najviše povijesnih izvora navodi kao vrijeme
nastanka riječi robot. Prema ostavštini samoga Karela Čapeka, riječ robot
izmislio je njegov brat Josef, također spisatelj. Zanimljiv podatak je da su
roboti iz R.U.R.-a po svojoj građi bliski tvorevinama koje danas zovemo androidi, mješavina stroja i čovjeka. To je
vremensko razdoblje u kojem dolazi do naglog razvoja filozofije rada i tehnika.
Na Zapadu je to vrijeme zrele industrijske epohe kada tehnologija postaje
vidljivo dominantan čimbenik ljudske civilizacije. Uvode se montažne linije kao
početak masovne primjene
industrijske automatizacije u
visokoserijskoj proizvodnji(Ford). Surovost radnih uvjeta stvorenih
industrijalizacijom dovela je do novih klasnih raslojavanja nepoznatih do tada.
Doba je to u kojem se osjeća veliki pesimizam u društvu, a novi radni uvjeti
dehumanizirali su čovjeka i pretvorili su ga u stroj koji mora ponavljati
automatizirane, monotone radnje tokom čitavog radnog vremena. U tom kontekstu
roboti su samo vrhunac vizije otuđenog društva
zasnovanog na kapitalu i tehnološkoj moći. Međutim za popularizaciju i
značenjsko proširenje riječi robot zaslužan je drugi pisac, američki rus Isaac
Asimov(1920.-1992.). On je posvetio veći dio svoga znanstvenofantastičnog opusa
upravo robotima. Riječ robot je iz književnosti u tehniku prenio veliki Asimov
poklonik Engleberger, voditelj projekta razvoja prvog programabilnog
industrijskog manipulatora, unatoč protivljenju stručnih krugova. Filološki
gledano, riječ je slavenskog podrijetla i vuče korijen od češke imenice robota, koja znači teški, prisilni rad.

3.KRETANJE HODOM
Ako se pojam robot shvati kao stroj koji ima ljudske osobine, dakle sposoban je raditi, kretati se, učiti i misliti onda se kao početci razvoja robotike mogu uzeti pokušaji da se razviju strojevi koji su sposobni samostalno hodati. Taj je problem i danas jako aktualan. O težini problema najbolje govori činjenica da su se prve konstrukcije hodajućih strojeva pojavile prije otprilike 150 godina, a tek su se posljednjih godina pojavili prvi uporabljivi prototipovi.
Jedna od prvih uočljivih osobina bioloških hodajućih organizama je fazni pomak u radu pokretačkih udova: dok pojedini udovi služe kao oslonci kojima se tijelo odupire o podlogu, ostali se prebacuju u novi položaj oslanjanja i odupiranja. Mehaničko rješenje tog problema sastoji se od dva zadatka. Prvi je pronalaženje mehanizma noge koji će omogućivati gibanje stope po određenoj putanji. Drugi zadatak sastoji se u rješavanju izmjenične izmjene stanja svih nogu stroja: dok se jednima odupiru, druge noge prebacuju stope u novi položaj. Poznati ruski matematičar P.L.Čebišev(1821-1894) istraživao je tzv. lambda-mehanizme koji imaju svojstvo generiranja matematičkih funkcija. To svojstvo iskoristio je za kinematičku sintezu noge svoga četveronožnog hodajućeg stroja. Takav hodajući stroj ostvaruje samo osnovne funkcije hoda. Mana mu je u tome što je vrlo neprilagodljiv podlozi po kojoj se giba. Problem je u tome što su udovi za pokretanje živih organizama usavršene člankovite strukture sa više stupnjeva slobode gibanja, dok ovaj stroj ima samo jedan stupanj slobode gibanja. Osamdesetih godina, s intenzivnim razvojem robotike, napušten je mehaničarski pristup sinteze putanje gibanja stope i prešlo se na programirano gibanje u kojem se računalom obavlja sinteza rada više motora kako bi se izvelo zadano pozicioniranje. Pokazalo se međutim da je to krivi pristup i da se uzglobljeni članci udova ponašaju kao višestruka njihala te da je optimalna energetska potrošnja za hodanje bioloških organizama izravna posljedica iskorištenja mehaničkih svojstava noge.

Slika 3. Hodajući robot novije generacije
4.UČENJE
Jedno od važnih svojstava robota je mogućnost učenja. Pojam koji je usko vezan uz pojam učenja je pojam programabilnosti. Čovjek unosi podatke u upravljačkoj jedinici o tome kako se robot mora kretati, a nakon toga robot mora biti u stanju ponoviti to isto. Sama definicija industrijskog robota kaže da je to fleksibilan programabilni stroj. Prvi programabilni strojevi pojavili su se već u 17. stoljeću iako je moguće da je bilo primjera i u ranija vremena. Prvi primjer programabilnih strojeva je programabilni tkalački stroj s perforiranim bubnjem kao nositeljem programskih podataka kojeg je izradio veliki Francuski konstruktor figuralnih automata Jaques de Vaucanson(1709.-1782.) 1745 godine. Nešto kasnije izrađen je programabilini tkalački stan Francuza Joseph-Mariea Jacquarda(1752.-1834.), koji je napravljen 1804. za potrebe industrije svile. Taj stroj posjedovao je dva osnovna svojstva suvremenih programabilnih strojeva: bušena programabilna kartica kao nosač informacija i mehaničko pojačalo snage koje niskoenergetsku informaciju pretvara u visokoenergetsku izvršnu aktivnost stroja. Prednost Jacquardovog rješenja pred Vaucansonovim je u tome što je bubanj imao ograničen broj podataka koji se mogao smjestiti na bubanj dok se ulančavanjem bušenih kartica mogao stvoriti neograničen lanac podataka te lako preprogramiranje i ispravljanje programskih pogrešaka. Zlatno doba bušenih kartica početi će nakon primjene Holeritova tabulatora(eng. Tabulating Machine) prilikom popisa stanovništva u SAD-u 1890. Bušene kartice bile su prvi korak u konstrukciji današnjih suvremenih memorijskih jedinica koje su neophodne za funkcioniranje robota, ali i kompletnog suvremenog života.
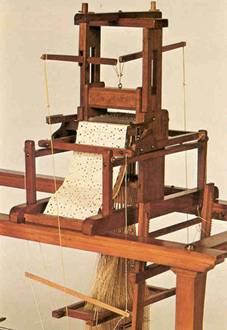
Slika 4. Jacquardov programabilini tkalački stan
5. PRVI INDUSTRIJSKI MANIPULACIJSKI ROBOT «UNIMATE»
Sredinom šezdesetih godina mogli su si Joseph F. Engelberger i George C. Devol, nakon nepunog desetljeća rada na prvom projektu industrijskog robota, priuštiti poprilično bizarnu poslugu: pićem na šanku poslužio ih je prvi industrijski robotski manipulator imena ˝Unimate˝. Godine 1962. korporacije Condec i Pulman osnovale su sestrinsku tvrtku Unimation, prvo u svijetu poznato poduzeće za proizvodnju robota.
Važna prethodnica nastanku ˝Unimate˝ robota bilo je izum Devolva o bilježenju pomaka mehaničkih uređaja na magnetsku traku. Devolve je dvije godine prije «Unimate» robota prijavio patent koji bi se mogao nazvati prethodnik suvremenih industrijskih robota. To je bio fleksibilni, reprogramabilni automat, međutim bio je siromašan sa mehaničkog stajališta, imao je mali broj zglobova(mali broj stupnjeva slobode), pa nije ispunjavao sve uvjete modernog robota. Još su dva proizvoda, povijesno gledano, mnogo pridonijela pri davanju konačnog izgleda manipulacijskog robota. Prvi je daljinski vođeni(teleoperacijski) manipulator koji se upotrebljavao za rad sa radioaktivnim materijalima. S gledišta mehaničke konstrukcije on je imao sve karakteristike robotičke ruke. Drugi proizvod je numerički alatni stroj koji je potekao iz vojne avio-industrije, a imao je analogni kontroler za istovremenu pozicijsku koordinaciju rada više servomotora.
Prvi manipulacijski robot ˝Unimate˝ bio je mehanička ruka tzv. polarne kinematičke strukture s hidrauličkim pogonom, što mu je omogućivalo veliku nosivost i točnost pozicioniranja uz male brzine gibanja. Bio je namijenjen operacijama ˝pick and place˝(uzmi i prenesi). Robot je imao dva osnovna modusa rada: učenje i izvođenje. U modusu učenja koje se provodilo po načelu ˝teaching by dooing˝(učenje pokazivanjem), operater robota vodio je ruku kroz određene pomake i uzastopno snimao te pomake u memoriju upravljačke jedinice robota. Nakon što bi izveo i snimio sve pokrete, prebacio bi se u modus izvođenja i robotska ruka ponovila bi identične kretnje onima koje je naučila. Industrijski manipulator je dakle playback stroj za snimanje i reproduciranje pokreta ili rada. ˝Unimate˝ je za svoje vrijeme bio poseban po tome što je posjedovao veliku fleksibilnost u usporedbi s konkurentskim proizvodima. Bio je prvi manipulacijski robot s povratnim servoupravljanjem po zadanoj putanji i zbog toga je bio tehnološki ispred konkurentskih proizvoda koji nisu mogli izvoditi trajektorijsko gibanje. ˝Unimate˝ se upravljao pomoću digitalnog kontrolera. Memorija je bila u obliku komutatorskog diska na koji su se bilježile naredbe za robot. Američko gospodarstvo je hladno primilo pojavu novog alata, pa je Engelberger razočaran njihovim odnosom otišao u Japan i njima prodao patentna prava za proizvodnju ˝Unimate˝ robota čime je počelo Japansko ˝robotičko čudo˝. Sredina šezdesetih godina može se slobodno označiti kao početak robotičke revolucije kada se roboti masovno počinju uvoditi u proizvodne hale.
6. KIBERNETIKA
U polustoljetnoj povijesti pojam ˝robot˝ imao je, a ima i danas jedinog pravog suparnika u pojmu ˝kiborg˝, akronim od (kib)ernetički (org)anizam kojim se označuje sinteza biološkog organizma i mehaničkog stroja. Kibernetika je sredinom dvadesetog stoljeća bila elitno znanstveno tehničko područje u okviru kojega se razvijala i robotika. Sedamdesetih godina pojam kibernetički počeo se postupno zamjenjivati pojmom informatički pa se danas riječ kibernetika gotovo posve izgubila. U povijesnom kontekstu robotika se na kibernetiku izravno naslanja pa i izvire iz područja automatskog upravljanja i servoregulacije, jer je povratna veza temeljni način funkcioniranja podsustava živih organizama i upravljivih strojeva. Dakle jedna od definicija kibernetike bila bi da je kibernetika znanstveno područje koje obuhvaća sve oblike kako ručnog tako i automatiziranoga upravljanja s povratnom vezom. Wiener (otac kibernetike) definirao je kibernetiku kao znanost o komunikaciji i upravljanju, kao znanje koje će pomoći boljoj organiziranosti našeg svijeta. Najvažniji metodologijski doprinos kibernetike je uspostava veze između biološkog i tehničkog, ona je svemu dala svoj matematički oblik.
7. OPĆENITO O KARAKTERISTIKAMA ROBOTA
Industrijski roboti se još nazivaju robotski manipulatori ili robotske ruke. Najčešća građa je u obliku lanaca krutih članaka koji su međusobno povezani pokretljivim zglobovima. Uspoređujući ih s ljudskom građom možemo reći da se robotski manipulator sastoji od grudi, nadlaktici, podlaktici i ramenim, lakatnim i ručnim zglobovima. Na kraju robotske ruke nalazi se završni mehanizam tj. alat ili šaka.
Roboti se mogu podijeliti po vrsti pogona, geometriji radnog prostora i načina upravljanja kretanjem. Po vrsti pogona mogu se podijeliti na:
· istosmerni, izmjenični i koračni motor kao pogon,
· hidrauličkki pogon,
· pneumatski pogon
Po geometriji radnog prostora: Radni prostor predstavlja skup točaka u trodimenzionalnom prostoru, koje se mogu dohvatiti ručnim zglobom robota na koji je pričvršćen završni mehanizam. Geometriju radnog prostora određuju prva tri zgloba robota. Osi prva tri zgloba određuju položaj ručnog zgloba, a osi preostala tri zgloba utvrđuju orijentaciju alata. Postoje dva osnovna tipa zglobova: rotacijski(R) i translacijski(T). Međusobnom kombinacijama R i T zglobova za prve tri osi određene su slijedeće konfiguracije robota:
· Pravokutna TTT
· Cilindrična RTT
· Sferna RRT
· Rotacijska RRR
· SCARA robot RTR,TRR ili RRT karakteristika im je da su osi sva tri
zgloba vertikalne
Po načinu upravljanja kretanjem:
· Od točke do točke(nije bitna putanja nego točnost pozicioniranja)
· Kontinuirano gibanje po putanji(bitna i trajektorija i točnost pozicioniranja)
Važna karakteristika svakog robota je broj njegovih osi za rotacijsko ili translacijsko gibanje. Obično ima šest osi, ako ima više od šest osi onda imamo i redundantne osi.
Da bi robot mogao obavljati neki posao nužno je moći upravljati položajem i orijentacijom alata. To se postiže određivanjem veze između varijabli zglobova robota te položaja i orijentacije alata tj. rješava se direktni kinematički problem.
Definicija problema direktne
kinematike: Ako je zadan vektor
varijabli zglobova robotskog manipulatora, tada treba odrediti položaj i
orijentaciju alata u odnosu na
koordinatni sustav pridružen bazi robota.
Da bi se definirao zadatak kojeg robot treba obaviti, potrebno je zadati točke u prostoru kroz koje alat mora proći, a to znači da je potrebno naći koordinate zglobova iz poznatih koordinata alata. To se rješava inverznom kinematikom. Gibanje robotičke ruke zadaje se tako da se definiraju pozicije i orijentacije kroz koje mora proći njegov vrh(alat) tijekom gibanja kroz prostor. Da bi se uopće mogao riješiti inverzni kinematički problem potrebno je prije riješiti direktni kinematički problem.
Za postizanje željenog gibanja vrha alata robota, uz kvalitetno upravljanje, potreban je i realan dinamički model robotske ruke. Postoje dva osnovna dinamička modela robota: Lagrange-Eulerov i Newton-Eulerov model.U dinamici se uzimaju u obzir masa članaka, potencijalna i kinetička energija članaka, trenje, inercijalna sila i sila teže. Kao i u kinematici i u dinamici postoji direktna i inverzna dinamika. Rješenjem direktne dinamike dobije se ovisnost varijabli zglobova o vremenu.
8. LITERATURA
Ratković Igor ; iz neobjavljene
knjige ”Uspon robota”
Kovačić Zdenko , Laci Vesna,
Bogdan Stjepan; “Osnove robotike”